Blackbox MPC
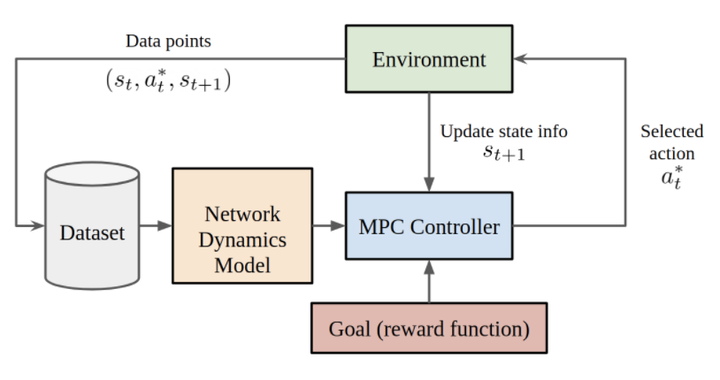
The code repository provides a framework of different derivative-free optimizers which can be used in conjuction with a model predictive controller and a learned dynamics model to control an agent in a mujoco or a gym environment.
The code was written as part of a research project at the Learning and Adaptive Systems Lab @ETH Zurich. Overall, the aim of this package is to enable performing optimal control with model-predictive control on any mujoco or gym environment in couple of steps.