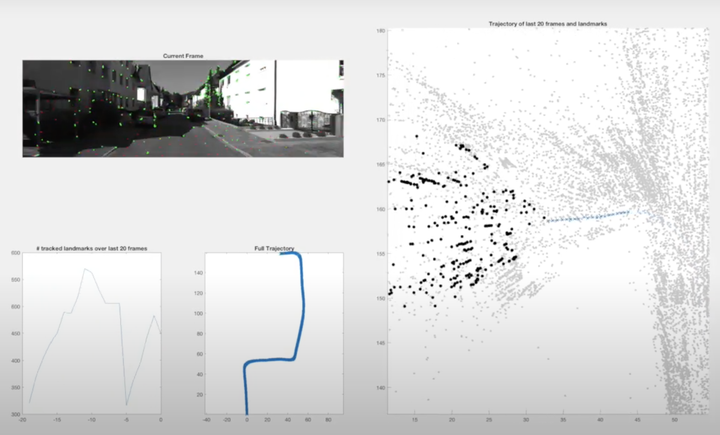
Successfully implemented a monocular visual odometry (VO) pipeline with the most essential features: initialization of 3D landmarks, key point tracking between two frames, pose estimation using established 2D ↔ 3D correspondences, and triangulation of new landmarks.